

L’automatisation de la conduite, nouvelles questions de sécurité routière et d’acceptabilité
La question de l’automatisation est centrale à l’échelle internationale et notamment européenne. Le Fersi a publié récemment une contribution de ses membres, dont l’Ifsttar (représenté par TS2), sur la question de l’automatisation. Cette contribution a été diffusée à la Commission Européenne au premier trimestre 2018. Le Véhicule Autonome a fait l’objet d’un plan de la Nouvelle France Industrielle qui a notamment permis de créer l’ITE Vedecom dont Ifsttar est membre. En outre, le plan NFI pour le « véhicule autonome » a également permis l’élaboration d‘une feuille de route pour définir les objectifs de recherche dans les domaines du Véhicule Particulier, du Véhicule Industriel, des Systèmes de Transport Public.
Rappelons tout d’abord que par véhicule autonome on entend un niveau d’automatisation complète (sans conducteur), correspondant au niveau 5 des classifications adoptées par la communauté scientifique et technique. Le Véhicule Automatisé (VA) est lui, plus ou moins automatisé et correspond à des niveaux de 1 à 4, jusqu’à un contrôle partagé du véhicule. Nous parlerons par la suite principalement des enjeux en matière de sécurité routière et d’acceptabilité liés à l’introduction des véhicules automatisés.
En dehors des problèmes classiques de fiabilité des systèmes, de gestion des événements perturbants extérieurs, une des dimensions importantes est la gestion des interactions entre le VA et les autres usagers. Sur ce sujet, dans le but de mieux percevoir les enjeux de l’évolution de la réglementation, la DGITM pilote une Task Force composée de la DGEC, DSCR, DGE, ANSSI et DGGN qui étudie la définition d’une méthode permettant d’apporter une aide à la qualification et à la priorisation des cas d'usages et des situations critiques de cas d’usages. Hélène Tattegrain, directrice du Lescot, a co-écrit la méthode en question.
A l’heure actuelle, les conducteurs modifient leurs comportements en présence des autres usagers et interagissent de différentes manières. Beaucoup de recherches se focalisent sur les cas critiques dans lesquels les conducteurs ont mal géré une situation à risque, et conçoivent des systèmes pour résoudre ces situations. Mais, même si le nombre d’accidents est élevé, le faible nombre de personnes tuées par km parcouru (1 pour 20 millions de km) indique que le conducteur gère correctement un grand nombre de situations critiques. En effet, Les usagers de la route ont développé un certain nombre de connaissances et compétences leur permettant d’estimer les risques et de mettre des stratégies en place, permettant à chacun d’anticiper les déplacements des autres.
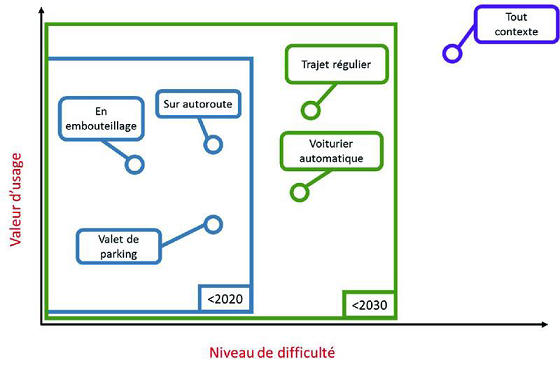
L’arrivée des véhicules automatisés va être progressive. Ces véhicules ne seront sans doute pas accessibles à tous les revenus et certains usagers pourront résister à l’achat de ce type de véhicule. Comme il faut plus de 10 ans pour renouveler 80 % de la flotte, pendant quelques années, les VA vont côtoyer des véhicules classiques, créant une certaine hétérogénéité dans le trafic et potentiellement créer de nouveaux types d’accidents. De plus, même lorsque les VA seront largement majoritaires dans le trafic, ils resteront confrontés à des usagers, utilisant d’autres modes de déplacement. Cette mixité à venir doit être prise en compte par les VA, dont le problème crucial sera de s’adapter au mieux aux usagers humains. Par ailleurs, la question d’une circulation en site propre ou non de VA est également envisagée (par exemple, aéroport, hôpital, campus...). Au final, deux grands concepts sont développés :
- Un premier avec des navettes autonomes sans chauffeur (de type mini bus de 15 personnes maximum). Le département TS2 porte notamment une proposition de projet d’Expérimentation Navette Autonome (ENA) en sites réels en réponse à l’AAP ADEME EVRA Expérimentation des Véhicules Routiers Autonomes.
- Le second avec des véhicules qui conserveraient leurs systèmes de commandes : ils rouleraient en autonomie dans certaines zones et en mode non autonome avec reprise en main du conducteur dans d’autres zones. C’est sur ce deuxième axe que la contribution du département est la plus originale et la plus importante.
Dans ce cadre, les travaux de TS2 viseront à anticiper et prédire les effets de l’arrivée des VA sur les conflits potentiels entre usagers et les accidents, notamment au travers des projets ENA et Surca. L’objectif du projet ENA, s’il est financé, sera de déployer une démarche de conception et de validation itérative, basée sur une démarche « centrée sur l’utilisateur » et sur une analyse des situations critiques des parcours, par une analyse de la sureté de fonctionnement basée sur des tests de validation sur pistes et sur une dizaine d’expérimentations sur sites représentant différents cas d’usage de navettes autonomes.
Concernant l’introduction des véhicules particuliers automatisés, six questions de recherche sont actuellement explorées et seront abordées dans un premier temps dans le projet Surca. Il s’agira d’abord d’analyser l’efficacité potentielle des VA sur les risques accidentels, en déterminant quels accidents devraient être réduits et quels accidents devraient perdurer avec leur arrivée. Cette analyse s’appuiera sur les scénarii d’interactions dysfonctionnelles qui pourront être repérés dans les bases de données dont nous disposons (EDA, S-VRAI, Registre du Rhône). Il s’agira de dégager les scénarii qui pourraient mettre en difficulté le VA dans différentes configurations, et avec une possible prédiction des accidents en fonction du taux de pénétration de ces technologies sur le marché.
Au-delà des situations d’accidents, il s’agit également de faire en sorte que les comportements et les réactions des VA soient les mieux adaptés aux interactions potentielles avec d’autres modes de déplacement qui resteront, eux, essentiellement pilotés par l’humain. Les différents types d’interactions analysés seront : VA–Usagers vulnérables (vélo, piétons), VA–Véhicules conventionnels (peu automatisés), VA–2RM. Il s’agira d’identifier les scénarios critiques que les véhicules doivent être capables de gérer.
Un troisième champ de recherche porte sur la question des nouvelles postures qui pourront être adoptées par les conducteurs lors d’activités annexes ou les occupants. Leurs effets potentiels en termes de nouvelles lésions lors de l’accident sont à étudier.
Par ailleurs, la conduite du VA amène à s’interroger sur l’adaptation comportementale du conducteur, à la fois en termes de capacité à reprendre en main le véhicule dans les situations où cela s’avère nécessaire, mais aussi aux pertes potentielles de compétences des conducteurs qui seront amenés à les utiliser. Par définition, dans un VA, les conducteurs seront autorisés à être distraits, inattentifs à cause d’attracteurs/distracteurs internes ou externes, incités à l’exécution de tâches secondaires, de tâches non liées à la conduite et produisant selon les cas de la distraction visuelle, cognitive, auditive ou biomécanique. Les interfaces homme/machine seront ainsi entièrement à repenser, pour les situations de reprise en main, aux différents niveaux d’automatisation. Les recherches en particulier en termes de distraction et d’acceptabilité, continueront sur les niveaux d’automatisation dans lesquels le conducteur doit conserver une partie de la tâche de conduite (niveau 1 2 3), par exemple sur des systèmes de détection d’usagers vulnérables et sur la conception d’IHM innovantes.
Un cinquième champ concerne la perception et l’acceptabilité des VA. Nous étudierons comment cette technologie est perçue par les futurs usagers, depuis la confiance dans la machine qui peut amener à des comportements inadaptés du conducteur (quel effet sur la consommation d’alcool lors de la conduite ?), au rejet, notamment par les populations les plus âgées, qui sont pourtant les cibles privilégiées de ces technologies. Ces questions feront appel à des approches expérimentales par focus groupes et par questionnaire. Nous travaillerons également sur l’acceptabilité de l’introduction de poids lourds automatisés sur autoroute (platooning camion).
Enfin, la connaissance fine possédée par les chercheurs de TS2 sur les scénarii accidentels et les lésions qui y sont attachées sera mise à profit pour le développement et l’intégration d’un e-call intelligent dans les VA, capable de prédire les lésions et d’appeler les services de secours les plus adaptés, en fonction des informations recueillies par les capteurs du véhicule. Le projet Crisis-Lab fait partie des projets Tremplins retenu par l’I-Site Future après l’appel à projet 2017.
Le projet ENA
Le projet ENA « Expérimentations de Navettes Autonomes » regroupe une expérimentation de services de navettes autonomes, en complémentarité du réseau de transport urbain existant et une expérimentation pour la desserte de zones rurales peu denses. Coordonné par l’Université Gustave Eiffel pour une durée de trois ans, ENA associe deux territoires à des partenaires académiques et industriels.
Pour relever le défi de la mobilité pour tous et dans tous les territoires, le gouvernement a présenté, le 14 mai 2018, sa stratégie nationale pour le développement des véhicules autonomes et a lancé l’appel à projet EVRA (Expérimentation du Véhicule Routier Autonome). D’ici 2022, les deux projets retenus mettront en œuvre des expérimentations réparties sur tout le territoire national.
Le projet ENA s’attache à répondre à la problématique du droit à la mobilité partout et pour tous. Ainsi pour chacune des deux expérimentations, les besoins et les attentes des usagers en termes de mobilité (offre de service, sécurité, confort, etc.) sont au cœur du projet.
C'est sur la plateforme d'essais Transpolis que sont réalisées les tests grandeur nature des navettes autonomes qui seront déployées sur les territoires lors des différentes expérimentations.